Projects

General-Purpose Foundation Model for Robotics
Applied a VLA model to Special-Purpose Vehicles (SPVs), achieving production-level deployment of a general-purpose foundation model for robotics and autonomous driving at Maum AI.
CostNav: A Navigation Benchmark for Cost-Aware Evaluation of Embodied Agents
CostNav supports a wide range of robot platforms and diverse outdoor environments, and evaluates navigation policies with a unified cost model that captures SLA compliance, operational cost, profitability, and break-even time. The toolkit enables scalable variation in robots, payloads, maps, and cloud-inference settings, and supports both learning-based and rule-based navigation stacks—making it easy to prototype and compare cost-aware policies without manual tuning for each scenario.
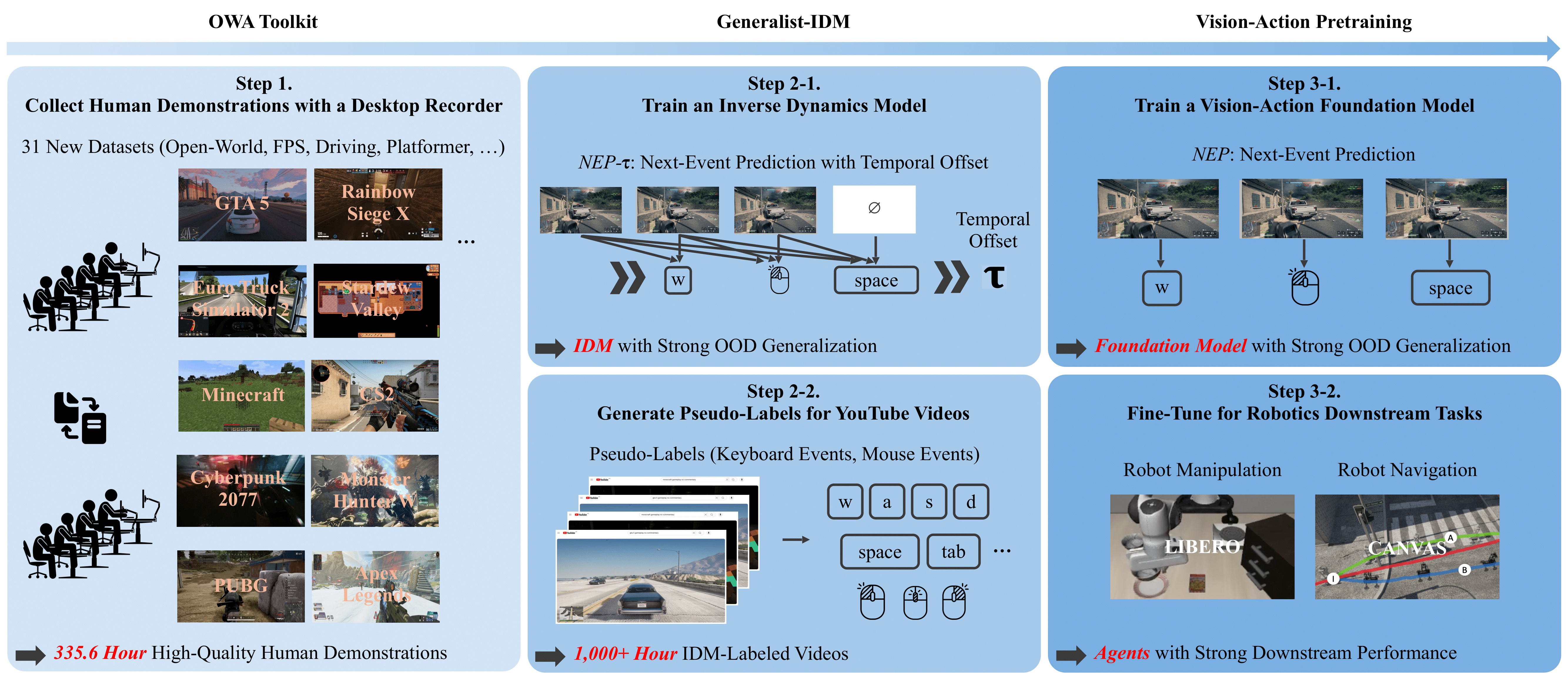
D2E - Desktop to Embodied AI
Scaled vision-action pretraining by leveraging desktop and gaming data to transfer skills to physical robotics tasks.
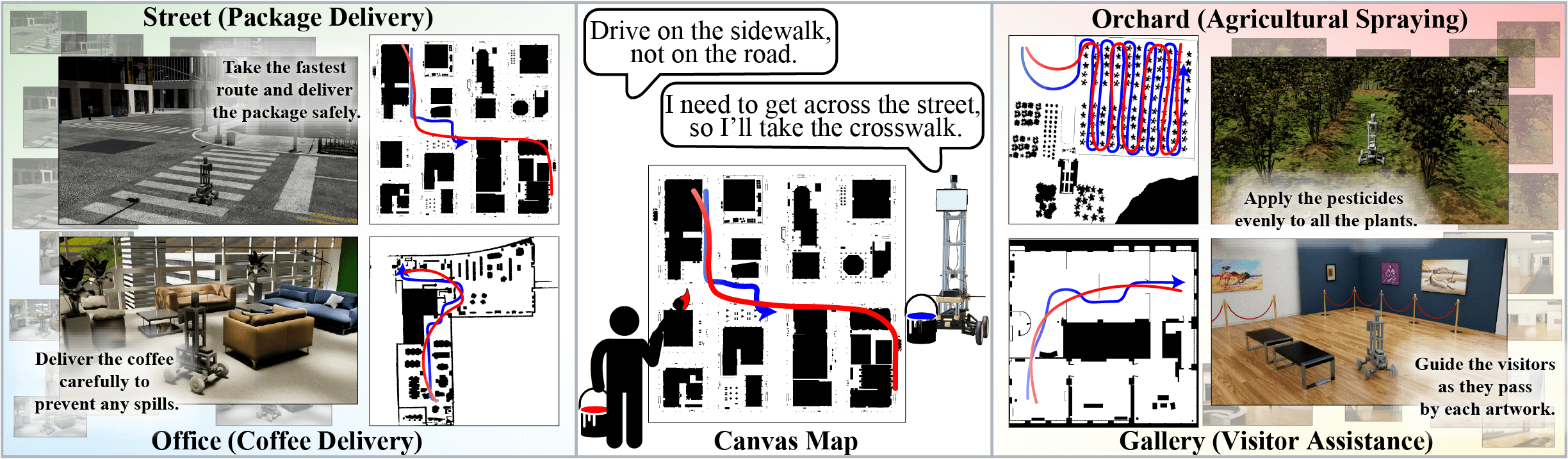
Vision Language Action model for navigation (SketchDrive)
Developed a Vision-Language-Action model for intuitive robot navigation enabling commonsense reasoning. Accepted to ICRA 2025 and received the Outstanding Paper Award at the NeurIPS 2024 Workshop.
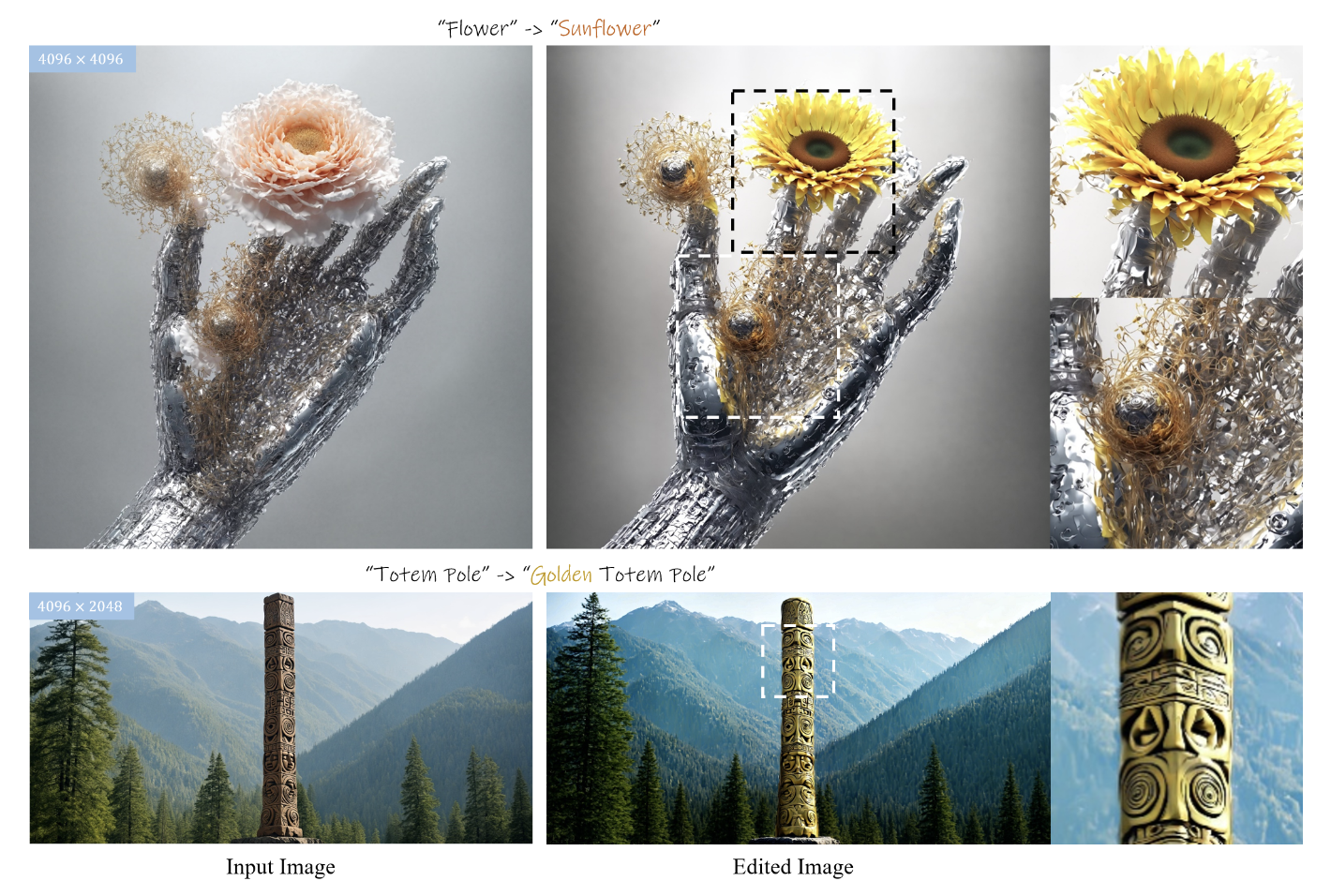
EditCrafter: Tuning-free High-Resolution Image Editing via Pretrained Diffusion Model
Proposed EditCrafter, a tuning-free high-resolution image editing method leveraging pre-trained text-to-image diffusion models. Addressed challenges in applying diffusion models to arbitrary aspect ratios and resolutions exceeding training data limits via a streamlined editing pipeline.
Fine-tuning Pocket-Conditioned 3D Molecule Generation via Reinforcement Learning
Enhanced the Pocket2Mol model using reinforcement learning to minimize stereochemical errors and optimize molecular properties, including drug-likeness and binding affinity.
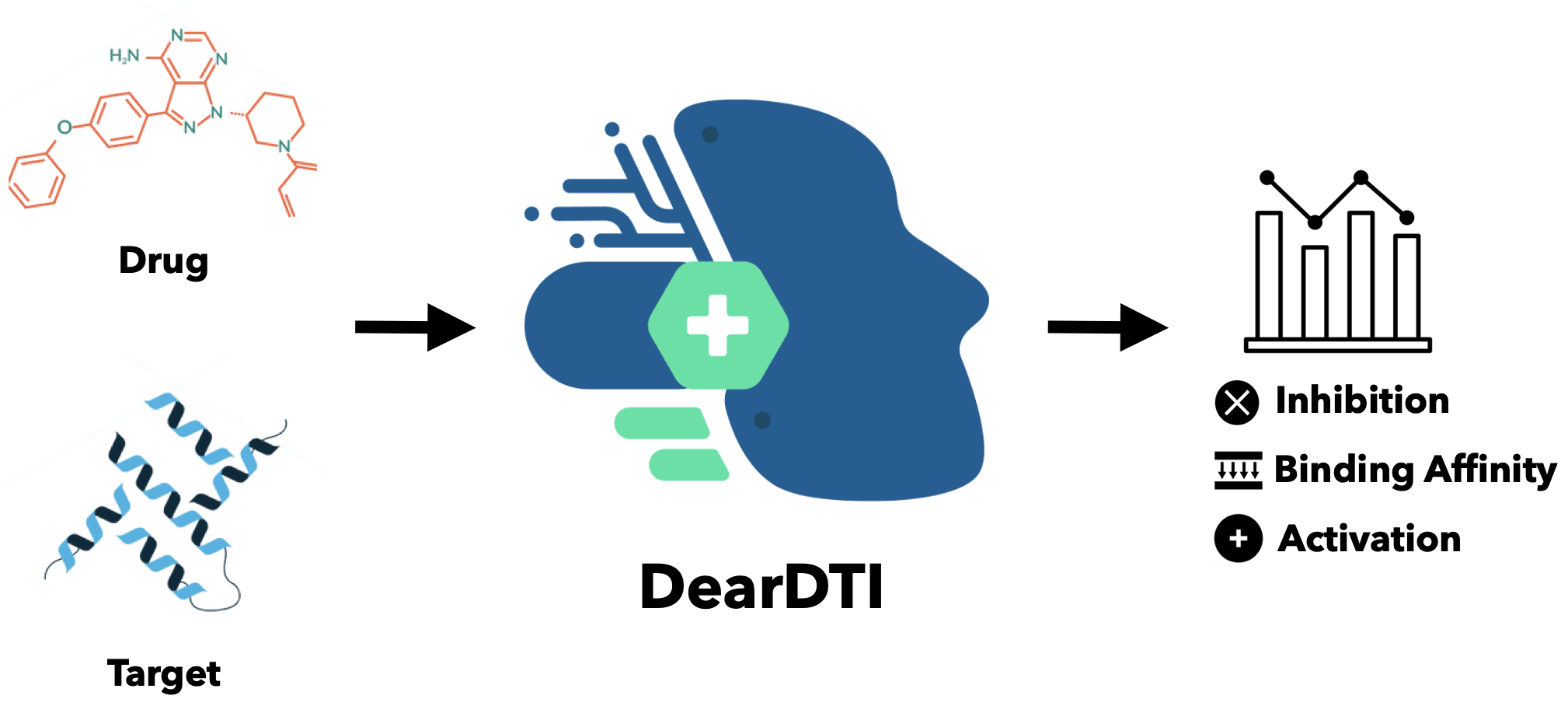
Drug Target Interaction (DTI) Model
Developed a Drug-Target Interaction (DTI) model architecture and fine-tuning framework for global pharmaceutical corporations at Deargen Inc.
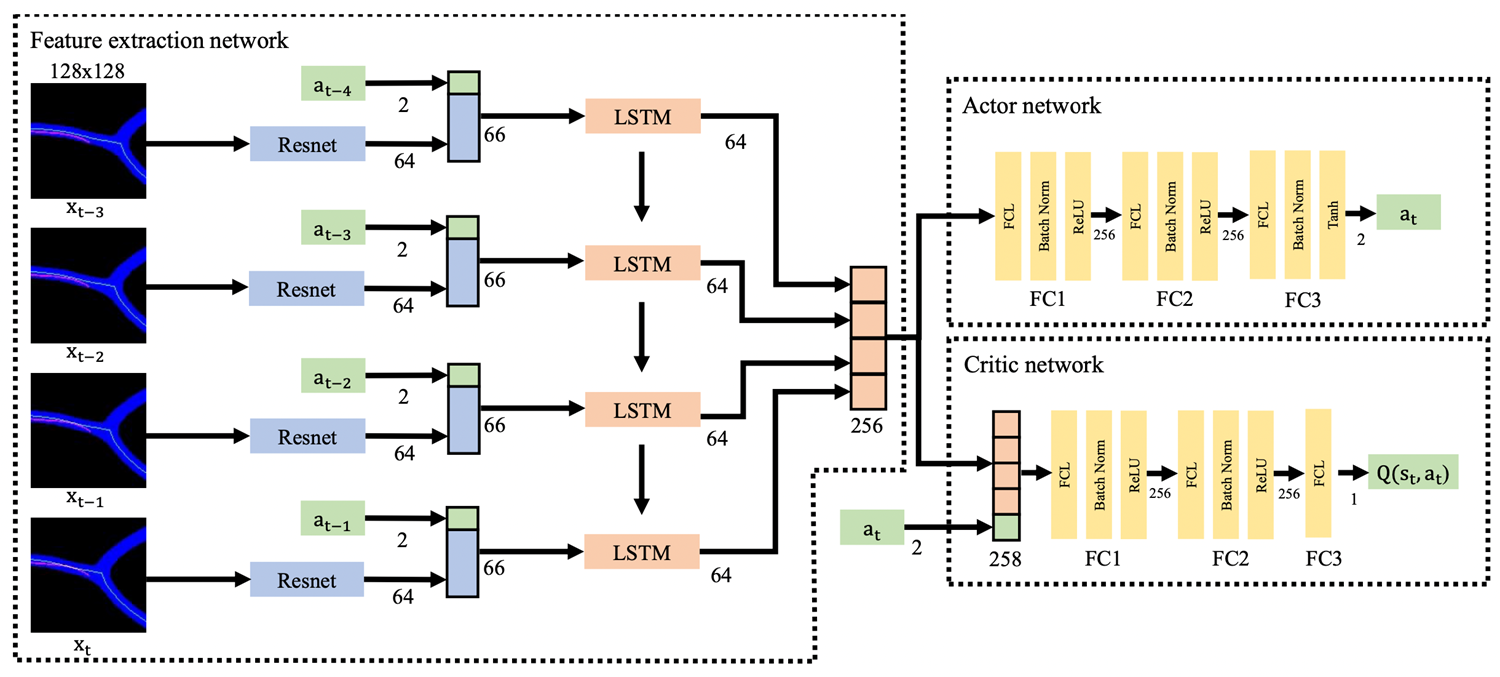
Autonomous Guidewire Navigation for Percutaneous Coronary Intervention
Developed a deep neural network to automate cardiovascular intervention procedures using only visual cues. Significantly improved performance over expert algorithms by employing behavioral cloning and DDPG reinforcement learning.

Development of Autonomous Drones for Ship Navigation Assistance
Conducted R&D in collaboration with HD Korea Shipbuilding & Offshore Engineering. Developed autonomous drones for ship operation assistance, featuring path planning relative to vessel movement and AI-driven environmental perception.

Autonomous Drone Competition
Awarded the Grand Prize in the autonomous drone competition hosted by the Defense Acquisition Program Administration (DAPA).