
Yongjun Cho
My research sits at the intersection of learning and embodiment — I am drawn to the question of how machines can acquire not just knowledge, but the skills to act reliably in the world.
I am currently a Senior Researcher on the Autonomous Driving AI Development Team at Kakao Mobility, developing generalist autonomous driving AI for reliable operation in complex real-world traffic environments.
I have hands-on experience across the full VLA deployment pipeline — from data collection and model training to edge optimization, system integration, and real-world production. I developed VLA pipelines (1B–7B params) deployed to 4 field sites at a 97.3% success rate, and shipped models to edge hardware (Jetson Thor). The work has been recognized at IROS 2022, ICRA 2025, and ICLR 2026, including a NeurIPS 2024 Workshop Outstanding Paper (top 3 of 100).
Research Interest: Robotics, Autonomous Navigation, Vision-Language-Action Models, Sim-to-Real Transfer, Training Pipelines, On-Device Inference, Reinforcement Learning, Diffusion Models
✉️ cyjun0304@kaist.ac.kr
News
🚗 Joined Kakao Mobility as a Senior Researcher on the Autonomous Driving AI Development Team, building generalist autonomous driving AI for complex real-world traffic.
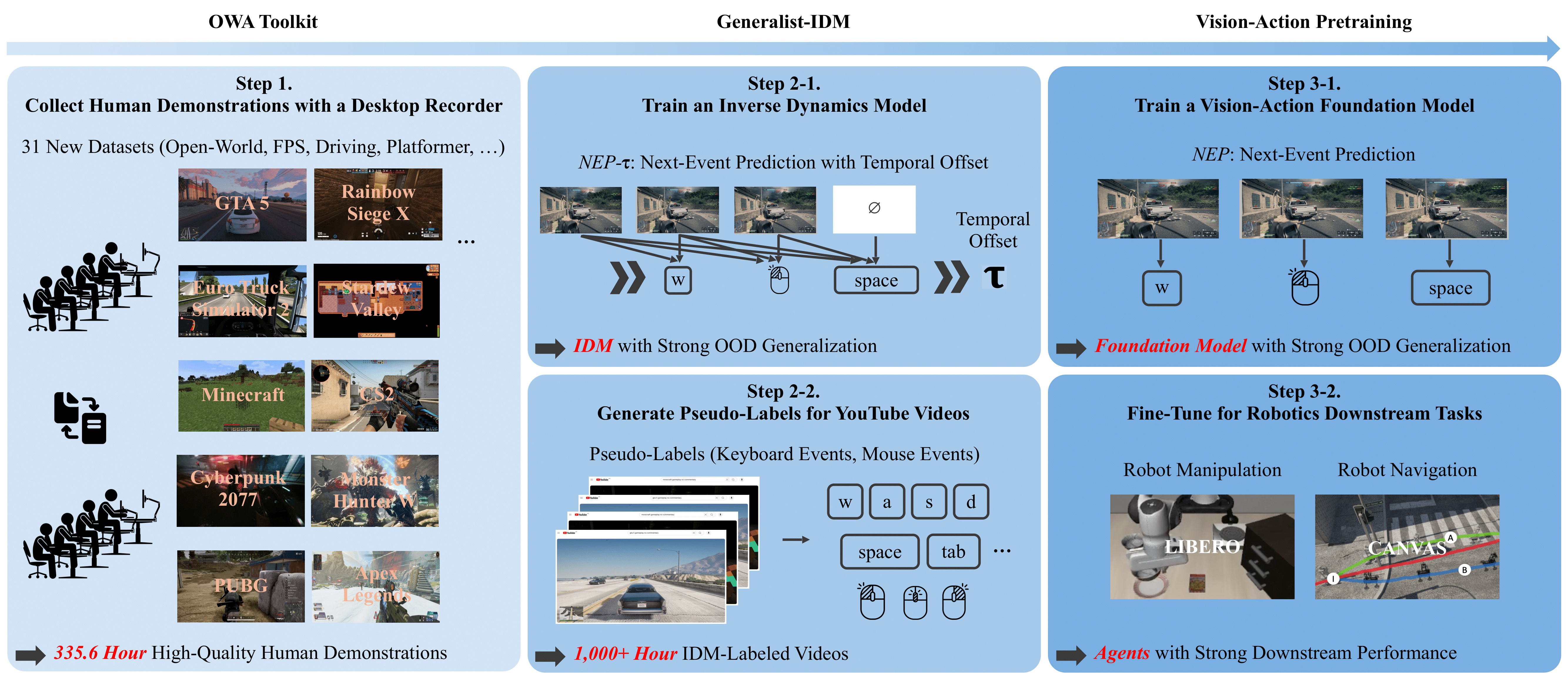
🎉 Our paper D2E got accepted to ICLR 2026! Bridging desktop data to embodied AI - scaling vision-action pretraining with 1.3K+ hours of data achieving 96.6% success on LIBERO! 🤖
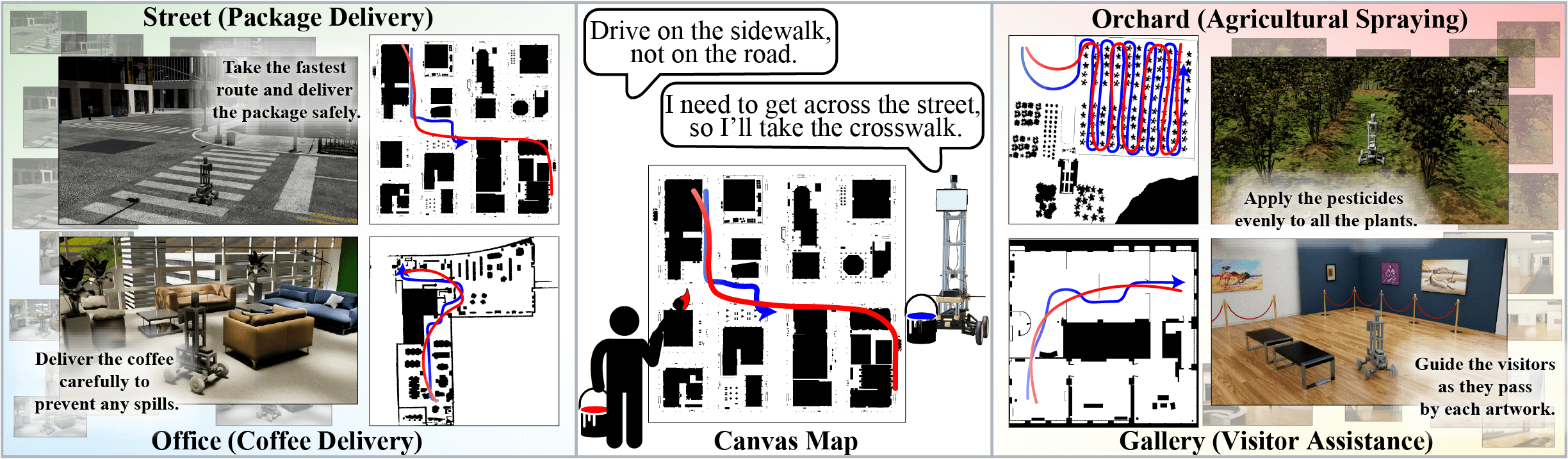
🎉 Our paper CANVAS got accepted to ICRA 2025!
🏆 Outstanding Paper Award at NeurIPS 2024 Open-World Agents Workshop (3 selected out of 100 accepted papers).
Publications
† denotes equal contribution, * denotes corresponding author
Co-First Author
[3]Suhwan Choi†, Yongjun Cho†, Minchan Kim†, , Youngjae Yu*
CANVAS: Commonsense-Aware Navigation System for Intuitive Human-Robot Interaction
International Conference on Robotics and Automation (ICRA) 2025
NeurIPS 2024 Workshop Open-World Agents (Outstanding Paper Award)
Co-First Author
[4]Daeseok Lee†, Yongjun Cho†
Fine-tuning Pocket-conditioned 3D Molecule Generation via Reinforcement Learning
ICLR 2024 Workshop on Generative and Experimental Perspectives for Biomolecular Design (GEM)
Co-First Author
[5]Yongjun Cho†, Jae-Hyeon Park†, Jaesoon Choi, , Dong Eui Chang*
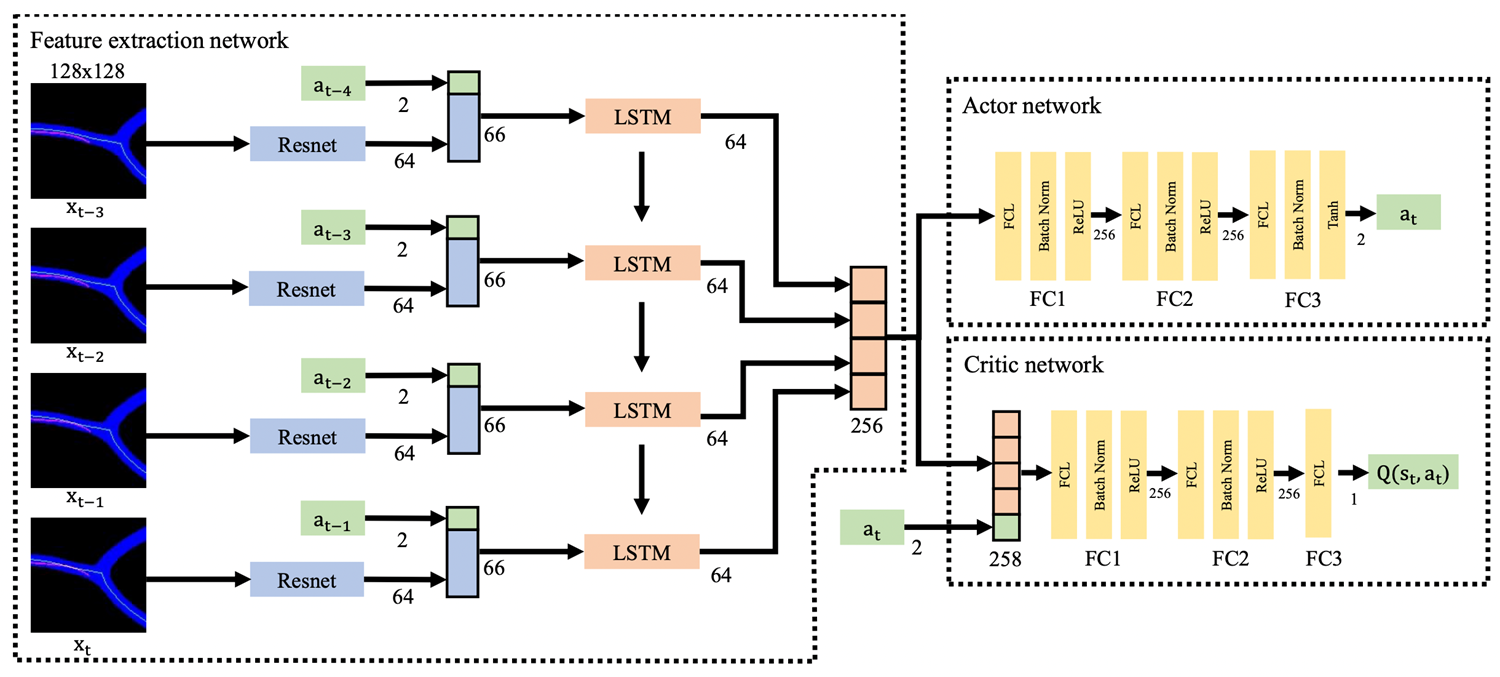
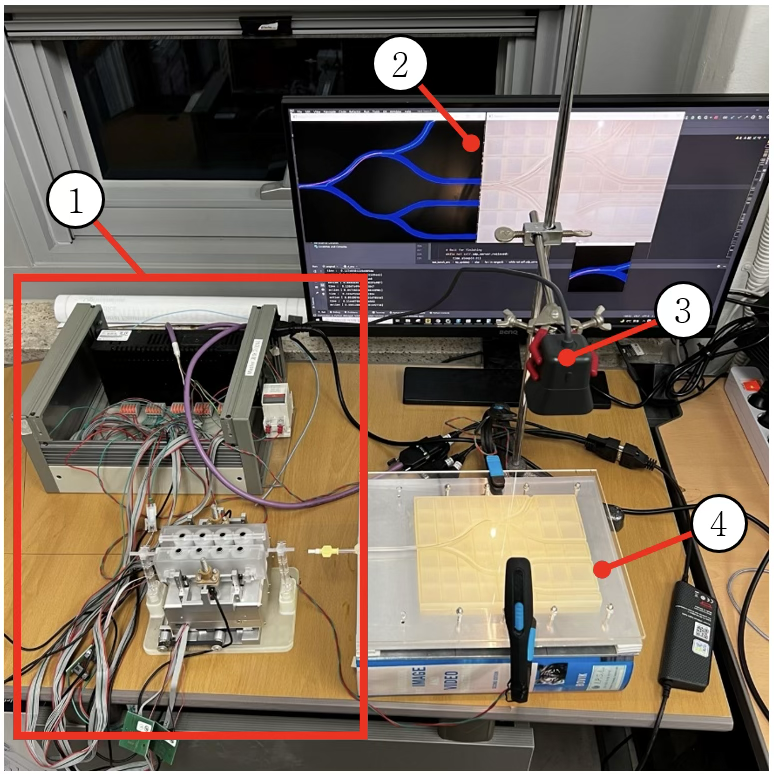
Sim-to-Real Transfer of Image-Based Autonomous Guidewire Navigation Trained by Deep Deterministic Policy Gradient with Behavior Cloning for Fast Learning
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
First Author
[6]Yongjun Cho, Jae-Hyeon Park, Jaesoon Choi, , Dong Eui Chang*
Image Processing Based Autonomous Guidewire Navigation in Percutaneous Coronary Intervention
2021 IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia)
[7]Jae-Hyeon Park, Yongjun Cho, Jin-Yeong Jeong, , Dong Eui Chang*
Real-time Quadrotor Actuator Fault Detection and Isolation Using Multivariate Statistical Analysis Techniques with Sensor Measurements
2020 20th International Conference on Control, Automation and Systems (ICCAS)
Experience
Senior Researcher @ Kakao Mobility
Seongnam, South Korea · Jun. 2026 - Present
- Research and development on autonomous driving AI — perception, prediction, planning, end-to-end driving logic, and learning-based planning models for safe real-world deployment.
- Design, build, and evaluate AI-based planning and navigation models spanning end-to-end learning, vision-language-action systems, and data-driven decision-making for complex traffic environments.
- Develop scalable software pipelines to process large-scale mobility and vehicle data, evaluate challenging edge cases, and improve model reliability across diverse driving scenarios.
Senior Research Scientist @ Maum AI
Seongnam, South Korea · Nov. 2024 - Jun. 2026
- Deployed VLA navigation models (1B params) to 4 real-world sites, improving success rate from 75% to 97.3% through human intervention data collection and sim-to-real domain randomization.
- Built multi-node training infrastructure: 5x storage reduction (video compression), 2x I/O throughput (Ceph), 3x training speedup (DeepSpeed ZeRO Stage 2, 4+ nodes, Slurm).
- Quantized VLA model to FP8 and deployed on NVIDIA Jetson Thor, collaborating with on-device deployment team on ROS2 inference pipeline.
- Ran technical PoCs and field demos at orchards and golf courses, directly leading to 2 enterprise contracts with major Korean corporations.
- Built benchmark environments and evaluation pipelines for D2E — 1,300+ hour pretraining data pipeline, open-sourced with 8,200+ downloads.
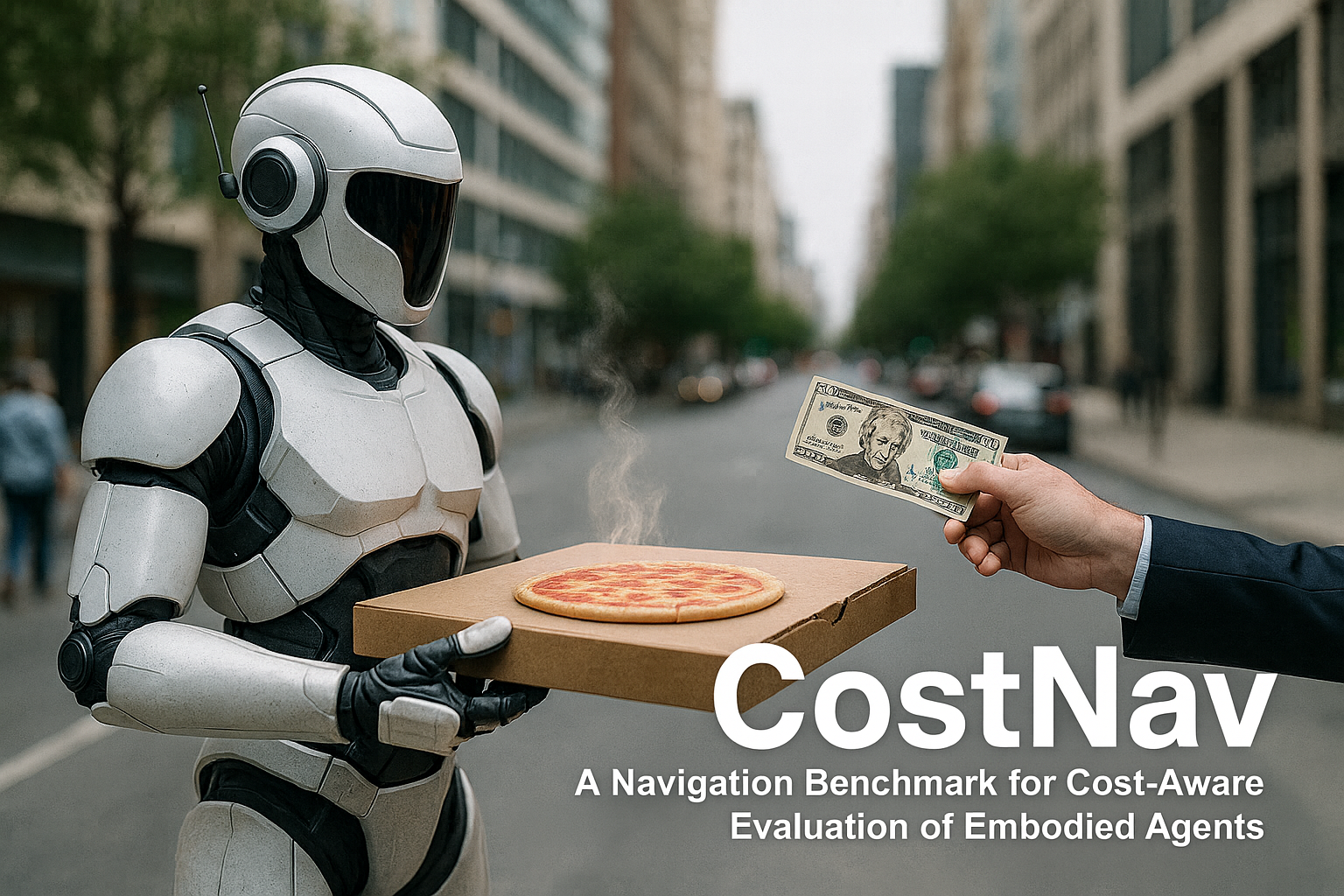
- Designed and open-sourced a navigation benchmark with economic cost modeling (simulation + 50-hour dataset + eval tools). Supervised SNU research intern.
- Our team joined an LG Electronics-led consortium (with KT) selected for the IITP Physical AI Leading Technology government project (340B KRW / $25M, 2026–2027), developing the World Foundation Model for indoor mobile manipulation robots.
Research Scientist @ Maum AI
Seongnam, South Korea · May 2024 - Oct. 2024
- Designed CANVAS, a VLA navigation framework controlled via sketches and natural language — published at ICRA 2025, awarded NeurIPS Workshop 2024 Outstanding Paper (top 3 of 100).
- Built the COMMAND dataset (48 hours, 219 km of real-world driving) and multi-container inference architecture used in all subsequent VLA deployments.
- Designed evaluation protocols in NVIDIA Isaac Sim and real-world environments, establishing the data collection and sim-to-real pipeline for the team.
- Filed 2 Korean patents on robot control via sketch and natural language commands.
Machine Learning Researcher @ Deargen Inc.
Seoul, South Korea · Apr. 2022 - Apr. 2024
- Built end-to-end Drug-Target Interaction pipeline (crawling, model design, training, eval) and delivered a custom fine-tuning service to a global big pharma client.
- Applied RL post-training (PPO) to a pretrained 3D molecular generative model, designing reward functions for drug-likeness optimization — published at ICLR 2024 Workshop, filed as Korean patent and US patent pending (Appl. No. 19/604,547).
Education
M.S. in School of Electrical Engineering
KAIST (Korea Advanced Institute of Science and Technology) · Daejeon, S.Korea · Mar. 2020 - Mar. 2022
- Advisor: Dong Eui Chang
- Built an image-based autonomous guidewire navigation system (DDPG + Behavior Cloning) on a custom-built vascular phantom testbed, achieving Sim-to-Real transfer (IROS 2022).
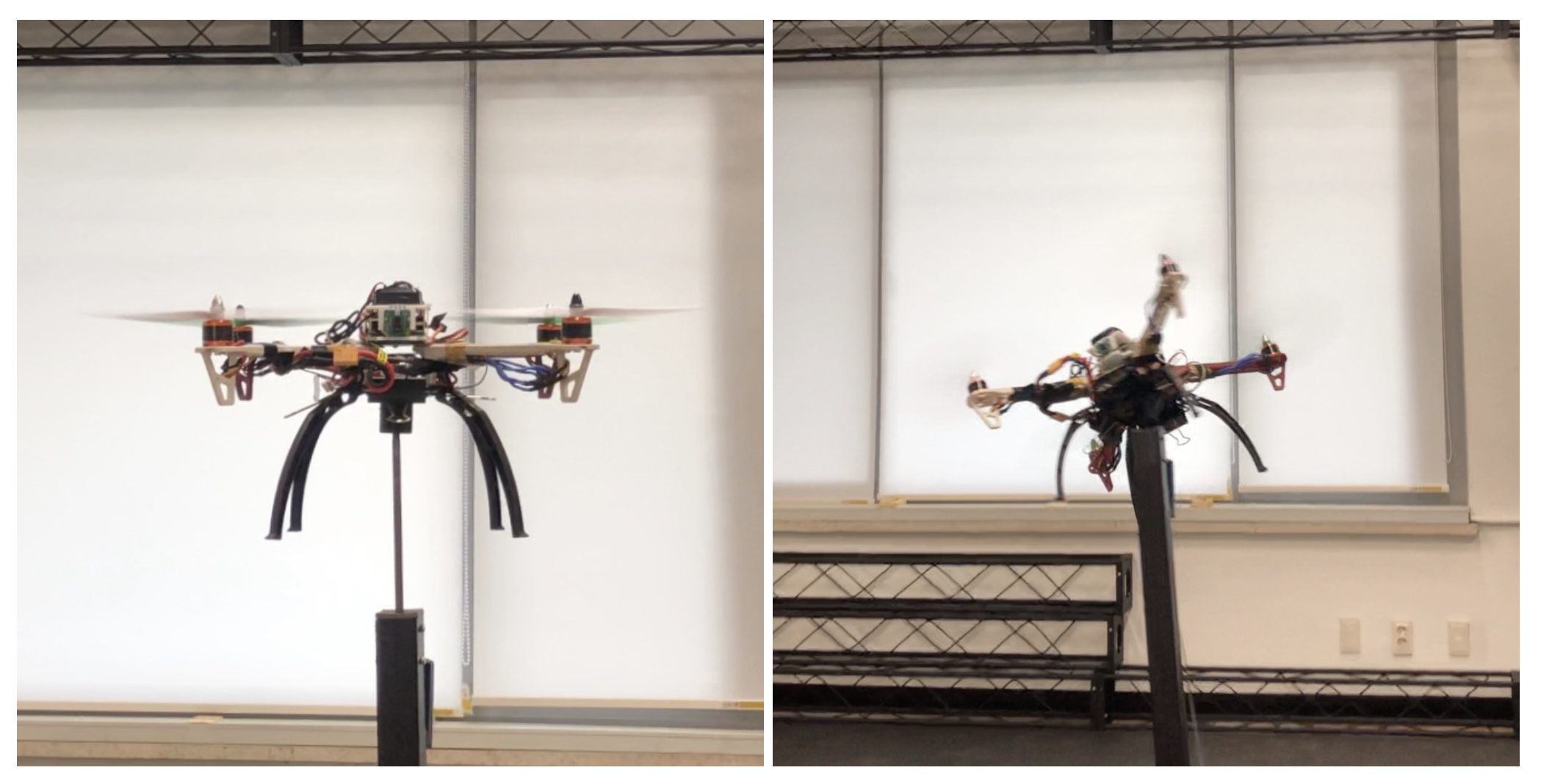
- Won the Grand Prize at the DAPA Autonomous Drone Competition (20+ teams) by developing 2D autonomous exploration; deployed on Jetson TX2 via Sim-to-Real transfer from Gazebo.
- Led HD Korea Shipbuilding industry collaboration on ship-assistance drones, building GPS-based navigation with relative path planning.
- Developed a real-time multivariate statistical anomaly detection system for quadrotor actuators (ICCAS 2020).
B.S. in Department of Mechanical Engineering
KAIST (Korea Advanced Institute of Science and Technology) · Daejeon, S.Korea · Mar. 2015 - Mar. 2020
- Graduation project: built an autonomous driving robot for library inventory management.
Honors & Awards
Outstanding Paper Awards
NeurIPS 2024 Workshop Open-World Agents
Vancouver, Canada
International
2024
Grand Prize
Autonomous Drone Competition hosted by the Defense Acquisition Program Administration
Daejeon, S.Korea
Domestic
2020
National Excellence Scholarship (Natural Sciences and Engineering)
Covers admission fee, full tuition, and additional support for study grant and living expenses
Korea Student Aid Foundation (KOSAF)
Scholarship
2015 - 2018